Interruptor Limitis Oscillationis Spirae Apex Plasticae

-

Domus robusta
-

Actio Fidelis
-

Vita Aucta
Descriptio Producti
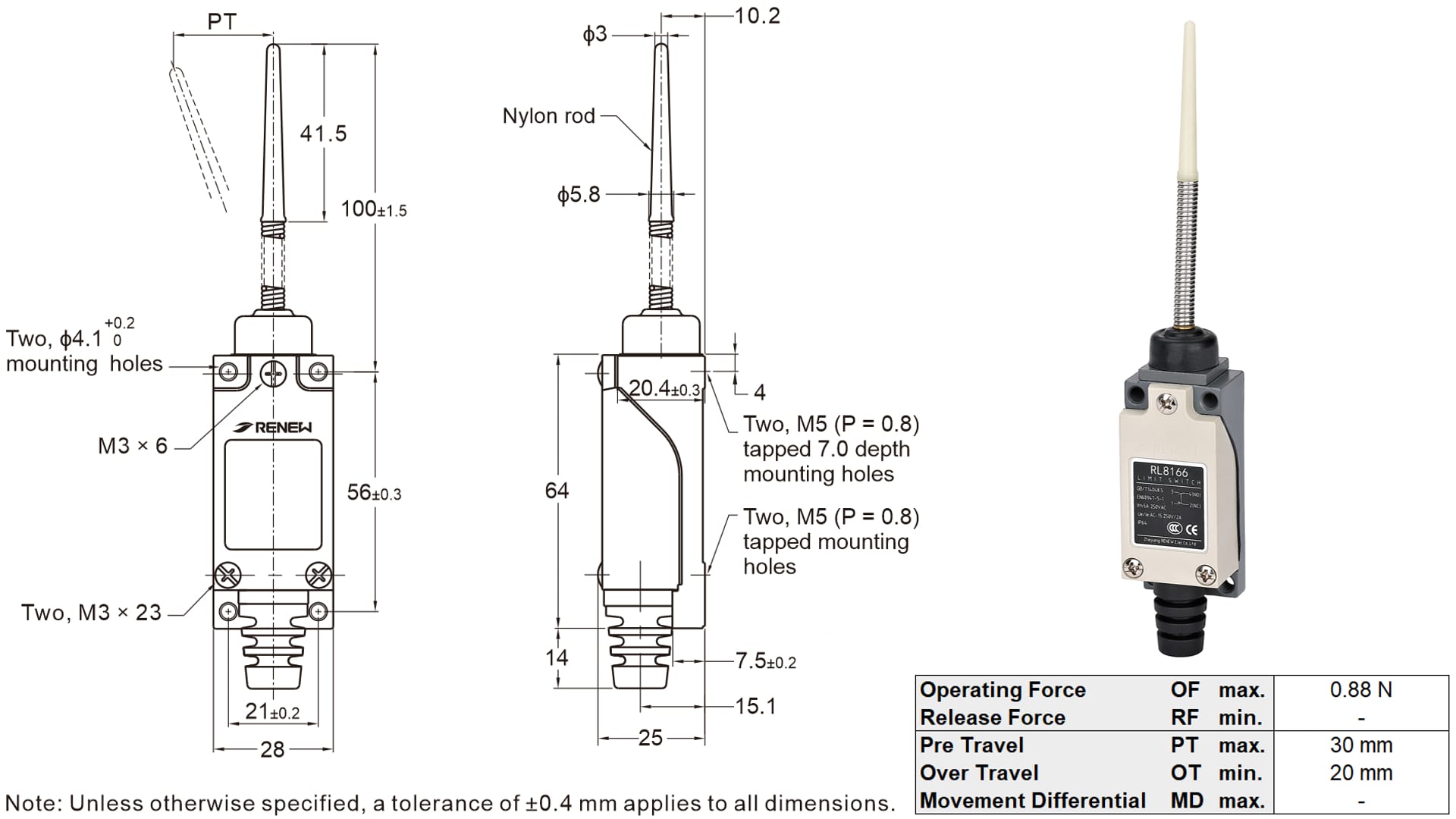
Interruptores limitis miniaturizati seriei RL8 a Renew fabricati auctam firmitatem et resistentiam contra condiciones asperas offerunt, cum vita mechanica usque ad decem miliones operationum. Hoc eos ideales reddit ad usus criticos et graves ubi interruptores basici normales non sufficerent. Virga flexibili elastica, interruptores limitis oscillantes spirales in multis directionibus (praeter directiones axiales) operari possunt, errores alignmentorum accommodantes. Aptissime apti sunt ad detegendas res quae ex variis angulis appropinquant. Apex plastica et apex metallica ad varios usus praesto sunt.
Dimensiones et Proprietates Operativae
Data Technica Generalia
| Amperorum aestimatio | 5 A, 250 VAC |
| Resistentia insulationis | 100 MΩ minimum (ad 500 VDC) |
| Resistentia contactus | 25 mΩ max. (valor initialis) |
| Robur dielectricum | Inter contactus eiusdem polaritatis 1000 VAC, 50/60 Hz per 1 min |
| Inter partes metallicas currentem portantes et terram, et inter singulas terminales et partes metallicas non currentem portantes 2000 VAC, 50/60 Hz per 1 min | |
| Resistentia vibrationis pro malfunctione | 10 ad 55 Hz, amplitudine dupla 1.5 mm (vitium: 1 ms max.) |
| Vita mechanica | Minimum decem miliones operationum (120 operationes/min) |
| Vita electrica | Minimum 300 000 operationes (sub onere resistentiae aestimato) |
| Gradus tutelae | Usus generalis: IP64 |
Applicatio
Interruptores limitis miniaturizati Renew partes gravissimas agunt in securitate, praecisione, et fidelitate variarum machinarum per varia spatia curanda. Hic sunt nonnullae applicationes populares vel potentiales.

Logistica et processus horrei
In horreis et officinis hodiernis, hi limites in machinis involucrorum adhiberi possunt ad fasciculos irregulariter formatos in convectore moventes detegendos. Virga flexibilis ad formam fasciculi flectitur, limitem excitans. Etiam in robotica et systematibus automatis adhiberi possunt ad positiones extremas bracchiorum roboticorum vel partium mobilium quae non semper perfecte congruere possunt detegendas.
Categoriae productorum
-

Interruptor Basicus Emboli ad Tabulam Montandum
-

Interruptor Limitis Horizontalis Vectis Cardinis
-

Interruptor Limitis Emboli Cylindrici Obsignati
-

Interruptor Basicus Vectis Cardinis Fili Vi Levae
-

Interruptor Basicus Minimale cum Vecte Cardinis Longi
-

Interruptor Limitis Horizontalis cum Embolo Vernali







